Regulator PID jest jednym z najbardziej użytecznych narzędzi automatyki, bo pozwala utrzymywać proces blisko wartości zadanej mimo zakłóceń, opóźnień i zmian obciążenia. W praktyce liczy się nie tylko sama idea działania, ale też to, kiedy taki układ ma sens, jak go stroić i dlaczego w jednych instalacjach sprawdza się znakomicie, a w innych lepiej postawić na prostszy wariant.
Najważniejsze rzeczy, które trzeba wiedzieć o regulacji PID
- Człon proporcjonalny przyspiesza reakcję, całkujący usuwa uchyb ustalony, a różniczkujący tłumi zbyt gwałtowne zmiany.
- W wolnych procesach termicznych bardzo często wystarcza PI, a pełny PID ma sens tam, gdzie potrzebna jest lepsza dynamika.
- Największy wpływ na efekt mają: jakość pomiaru, opóźnienie obiektu, saturacja siłownika i czas próbkowania.
- Złe strojenie zwykle objawia się oscylacjami, przeregulowaniem, wolnym dochodzeniem do wartości zadanej albo szarpaniem wyjścia.
- W energetyce i automatyce PID spotyka się m.in. w regulacji temperatury, przepływu, ciśnienia, prędkości napędów i układów pomocniczych przy instalacjach PV.
Jak działa układ PID w praktyce
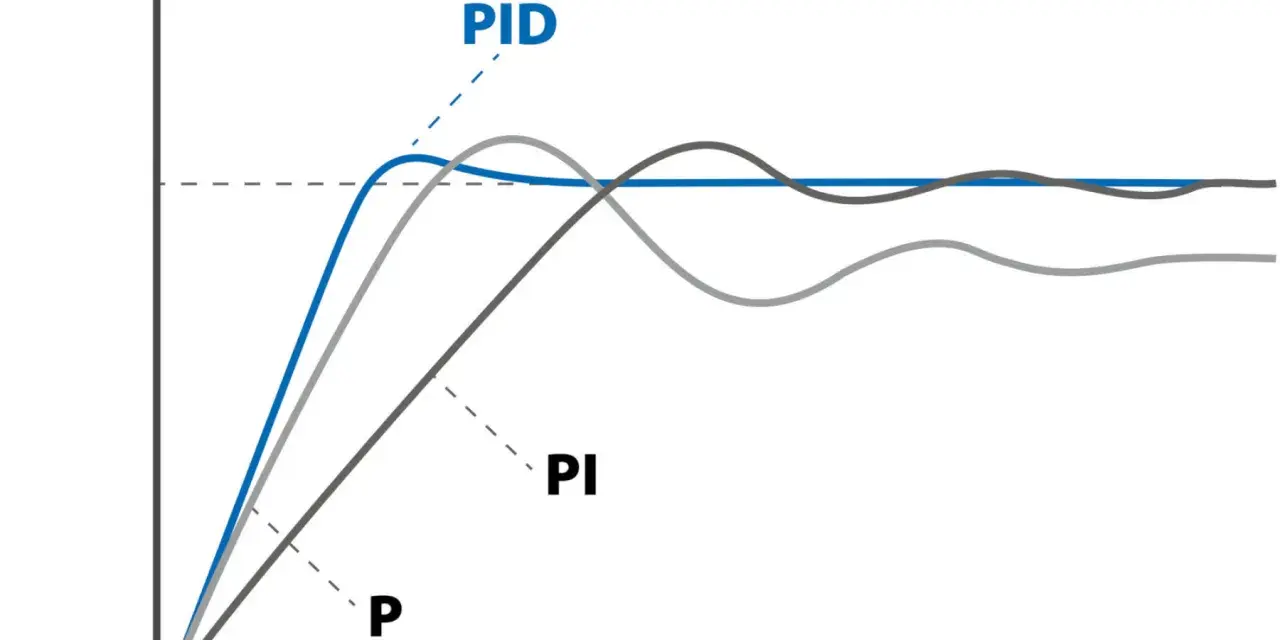
Najprościej rzecz ujmując, taki regulator porównuje wartość zadaną z pomiarem i na tej podstawie koryguje sygnał sterujący. Nie „zgaduje” przyszłości, tylko stale zamyka pętlę sprzężenia zwrotnego, dzięki czemu proces wraca w okolice celu nawet wtedy, gdy pojawiają się zakłócenia. W zapisie matematycznym wyjście można opisać jako sumę trzech składników: proporcjonalnego, całkującego i różniczkującego.
W praktyce każdy z nich robi coś innego. Człon P reaguje na bieżący błąd, więc daje szybkie przyspieszenie reakcji. Człon I sumuje błąd w czasie i usuwa uchyb ustalony, czyli sytuację, w której układ „stoi” obok wartości zadanej. Człon D obserwuje tempo zmian błędu i działa jak hamulec, który pomaga ograniczyć przeregulowanie. To właśnie dlatego PID bywa skuteczny: łączy trzy różne sposoby patrzenia na ten sam problem.
| Człon | Co robi | Co zwykle poprawia | Gdzie trzeba uważać |
|---|---|---|---|
| P | Reaguje na aktualny błąd | Szybkość odpowiedzi | Zbyt duże wzmocnienie może wywołać oscylacje |
| I | Sumuje błąd w czasie | Usunięcie uchybu ustalonego | Może powodować windup przy ograniczeniu siłownika |
| D | Patrzy na tempo zmiany błędu | Tłumienie przeregulowania | Wzmacnia szum pomiarowy i wymaga filtracji |
W układach przemysłowych istotne jest też to, że każdy z tych składników działa inaczej w zależności od obiektu. Inaczej zachowuje się pętla temperatury z dużą bezwładnością, inaczej szybki napęd serwo, a jeszcze inaczej obieg z opóźnieniem transportowym. To prowadzi wprost do pytania, kiedy pełny PID ma sens, a kiedy lepiej wybrać prostszy wariant.
Kiedy PID ma sens, a kiedy lepszy będzie PI
Nie każdy proces potrzebuje wszystkich trzech członów. W wielu układach wolnych, szczególnie termicznych, człon różniczkujący wnosi niewiele, a czasem tylko pogarsza stabilność przez wzmacnianie szumu. W takich przypadkach PI bywa rozsądniejszym wyborem niż pełny PID, bo daje wystarczającą jakość regulacji przy mniejszej wrażliwości na zakłócenia pomiarowe.
| Sytuacja | Najczęstszy wybór | Dlaczego |
|---|---|---|
| Temperatura, przepływ, ciśnienie | PI | Proces jest zwykle wolny, a uchyb ustalony trzeba usunąć bez nadmiernego szumu na wyjściu |
| Szybki napęd, pozycjonowanie, ruch osi | PID | Potrzebna jest lepsza dynamika i tłumienie przeregulowania |
| Prosty układ grzania z dużą tolerancją błędu | On-off lub PI | Nie ma sensu komplikować regulacji, jeśli dokładność nie jest krytyczna |
| Pomiar jest zaszumiony | PI lub PID z mocno filtrowanym D | Człon D łatwo reaguje na szum i może wprowadzać niepotrzebne drgania |
| Siłownik często dochodzi do ograniczeń | PID lub PI z anti-windup | Trzeba chronić całkowanie przed „nakręcaniem” wyjścia |
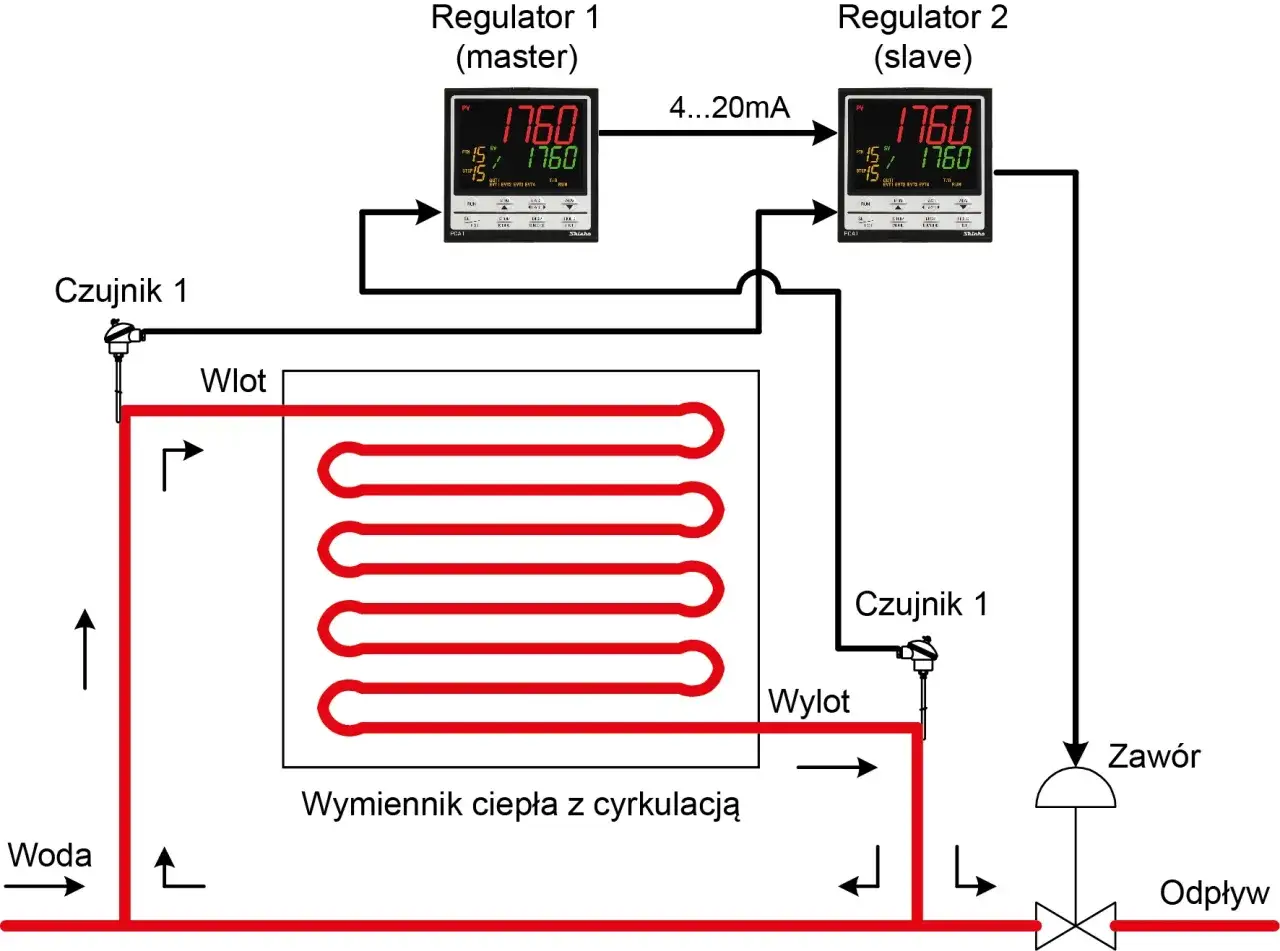
W instalacjach energetycznych i okołoenergetycznych, które często mają dużą bezwładność, najczęściej widzę pętle temperatury, przepływu, ciśnienia oraz sterowanie wentylatorami i pompami. W fotowoltaice PID częściej wspiera układy pomocnicze niż samo śledzenie mocy maksymalnej, bo MPPT działa inną logiką; tutaj regulator częściej pilnuje warunków pracy niż samego punktu mocy. Gdy już wiadomo, gdzie taki algorytm ma sens, można przejść do najważniejszej części: strojenia.
Jak stroić nastawy bez zgadywania
Jeśli mam ustawić taki układ od zera, nie podkręcam wszystkich parametrów naraz. Najpierw sprawdzam, jak zachowuje się obiekt, czy czujnik nie wprowadza opóźnienia i czy wyjście ma wystarczający zakres. Dopiero potem dobieram nastawy. W praktyce większą różnicę robi porządne strojenie niż sam wybór między PI a PID.
- Zacznij od czystego członu P i zwiększaj wzmocnienie do momentu, w którym odpowiedź staje się szybka, ale jeszcze nie oscyluje.
- Dodaj człon I dopiero wtedy, gdy widać uchyb ustalony lub stałe odchylenie od wartości zadanej.
- Jeśli układ jest szybki, a pomiar czysty, wprowadź człon D, ale filtruj go, bo bez tego będzie wzmacniał szum.
- Sprawdź reakcję na skok wartości zadanej i na zakłócenie zewnętrzne, bo to są dwa różne testy jakości regulacji.
- Zweryfikuj nasycenie wyjścia i zachowanie przy ograniczeniach siłownika, czyli klasyczny problem windup.
| Objaw | Najbardziej prawdopodobna przyczyna | Co zwykle pomaga |
|---|---|---|
| Oscylacje po skoku | Zbyt duże P lub I | Zmniejszyć Kp, ograniczyć Ki, ewentualnie dodać łagodny D |
| Powolne dochodzenie do wartości zadanej | Za słaby człon P lub zbyt ostrożne I | Podnieść Kp albo wzmocnić działanie całkujące |
| Stały uchyb | Za małe I lub jego brak | Włączyć i zwiększyć wpływ członu całkującego |
| Szarpanie wyjścia | Szum pomiarowy lub zbyt agresywny D | Wygładzić pomiar, osłabić D albo wprowadzić filtr |
| Długie wychodzenie z nasycenia | Windup całki | Włączyć anti-windup i sprawdzić ograniczenia wyjścia |
Na etapie strojenia bardzo łatwo popełnić błąd polegający na testowaniu układu „na sucho”, bez realnego obciążenia. Wtedy nastawy wyglądają dobrze tylko pozornie, a po uruchomieniu procesu całość zaczyna się zachowywać zupełnie inaczej. To dobry moment, żeby spojrzeć na konkretne obszary, w których PID naprawdę pracuje na co dzień.
Gdzie PID spotyka się najczęściej
Największą zaletą tej regulacji jest uniwersalność. Ten sam mechanizm może sterować zupełnie różnymi procesami, jeśli tylko da się je opisać uchybem i sygnałem wyjściowym. W praktyce bardzo często chodzi o układy, które mają utrzymać stabilność mimo zakłóceń, a nie o sterowanie „na oko”.
| Obszar | Co reguluje PID | Dlaczego to działa |
|---|---|---|
| Ogrzewanie i chłodzenie | Temperaturę w piecach, zbiornikach, wymiennikach i szafach sterowniczych | Proces jest zwykle powolny, ale wymaga dokładności i stabilności |
| Układy hydrauliczne | Przepływ i ciśnienie | Zakłócenia pojawiają się często, więc pętla zwrotna ma realną wartość |
| Napędy elektryczne | Prędkość lub pozycję silnika | Potrzebna jest szybka reakcja i ograniczenie przeregulowania |
| Instalacje fotowoltaiczne i energetyczne | Wentylację, temperaturę osprzętu, pracę pomp, pozycjonowanie trackerów | Układ pomocniczy musi działać stabilnie mimo zmian warunków otoczenia |
| Automatyka budynkowa | Komfort cieplny, pracę centrali wentylacyjnych, sterowanie obiegami | Tu liczy się płynność regulacji i rozsądne zużycie energii |
Właśnie w takich aplikacjach dobrze widać, że PID nie jest sztuką dla sztuki. To po prostu praktyczny sposób, żeby proces nie odpływał od celu, gdy zmienia się obciążenie albo warunki pracy. I tu dochodzimy do problemów, które najczęściej psują efekt mimo poprawnej teorii.
Najczęstsze błędy, które psują działanie regulacji
Największy błąd, jaki widzę przy wdrożeniach, to traktowanie strojenia jak jednorazowego zadania zamiast procesu dopasowania do konkretnego obiektu. Regulator może być dobrze opisany w teorii, a i tak działać słabo, jeśli czujnik jest źle umieszczony, siłownik ma ograniczenia albo sam proces zmienia się mocniej, niż zakładano.
- Zbyt agresywne Kp powoduje szybkie oscylacje i nerwową pracę wyjścia.
- Za mocne I daje windup i długi powrót do normalnej pracy po nasyceniu.
- Brak filtru dla D prowadzi do szarpania, bo człon różniczkujący wzmacnia szum.
- Ignorowanie opóźnień obiektu sprawia, że układ reaguje zbyt późno i zaczyna „gonić” własny sygnał.
- Zły czas próbkowania w implementacji cyfrowej może zrujnować nawet dobrze policzone nastawy.
- Brak testów na realnym obciążeniu daje fałszywe poczucie bezpieczeństwa.
W praktyce pomaga mi jedna prosta zasada: najpierw trzeba uporządkować pomiar i ograniczenia wykonawcze, a dopiero potem dobierać wzmocnienia. Jeśli układ ma duże nasycenie, silny szum albo nieprzewidywalne opóźnienie, to nawet dobry PID będzie wymagał dodatkowych mechanizmów, nie tylko samych nastaw. Z tego wynika ostatnia, najważniejsza rzecz, którą warto zapamiętać przed wdrożeniem.
Co warto zapamiętać przed wdrożeniem PID w realnym układzie
Najlepszy efekt daje nie „najmocniejszy” regulator, tylko taki, który pasuje do charakteru procesu. W wolnych układach termicznych często wystarcza PI, w szybszych napędach przydaje się pełny PID, a w procesach z silnym szumem i opóźnieniem trzeba szczególnie uważać na człon D oraz całkowanie. PID jest skuteczny wtedy, gdy jest dobrany do obiektu, a nie do ogólnej teorii.
Jeśli miałbym streścić temat jednym zdaniem, powiedziałbym tak: dobry regulator nie naprawi złego procesu, ale dobrze ustawiony potrafi wycisnąć z niego bardzo stabilną i przewidywalną pracę. W automatyce i w układach związanych z energetyką właśnie o to chodzi najbardziej: o kontrolę, która nie przeszkadza, tylko skutecznie trzyma parametry w ryzach przez długi czas.